By Carmen Gil-Hoed
In this blog, Carmen, a biology student at the Autonomous University of Madrid, describes how ants team up to carry food that’s too big for one ant alone. She reveals how they coordinate their efforts—and sometimes struggle—to get the job done. Their teamwork is so impressive it even inspires robotics research! Read her latest article in Insectes Sociaux here.
While foraging, ants often encounter food items too large for a single worker to carry. To overcome this challenge and optimize food intake by the colony, some species have evolved cooperative transport, a behaviour in which multiple individuals work together to move an object that is too large for a single ant to carry. Aside from humans, ants are the only animals known to regularly engage in large-scale cooperative transport (Czaczkes & Ratnieks, 2013).

Why not all ant species engage in cooperative transport? And why do we see such a wide range of abilities? From species where the transported objects seem to fly directly to their goal, to others where there is no coordination and movement is slow and inefficient. By describing the well-coordinated cooperative transport in the invasive ant Anoplolepies gracilipes, we hope our work brings us closer to answering these questions soon.
We studied whether A. gracilipes ants visit a foraging area with Diacamma rugosum footprints and how the presence of these footprints affected their decision to cooperatively transport food by using a Y-maze. We tested three experiments: D. rugosum footprints Vs. nest matesfootprints, D. rugosum footprints Vs. No footprints and nest mates footprints Vs. No footprints. During the test runs we recorded the retrieval time for each item, its weight, the number of ants involved in transport and their positions.


96 times out of 144 (66.7%) the cockroaches were successfully transported to the nest through a tight (3 cm) paper branch. This indicates a high level of coordination among the ants. When the ants failed, they mostly did it by falling out of the paper branch. This shows that while the ants seem strong enough to carry the load, navigation errors can occur. Suggesting that the biggest challenge during the transport is the coordination of forces.
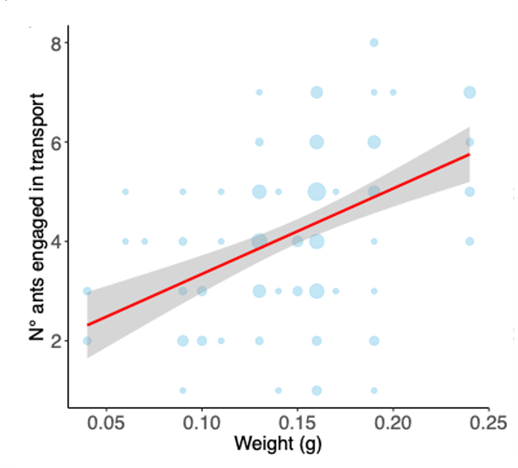
One thing we observed was that the number of workers involved in cooperative transport increased with the load’s weight. This pattern is consistent with findings in other ant species like: Eciton burchellii and Dorylus wilverthi (Franks et al., 2001). It demonstrates that ants can assess transport difficulty and determine the necessary number of individuals for the task. However, the underlying mechanism behind this decision-making process remains unclear and needs further investigation. Another interesting finding is that the probability of successfully carrying an item to the nest increased with the number of ants involved in the transport and decreased with the weight of the prey item. Further, we observed that while A. gracilipes ants adjusted the number of carriers during transport, they appeared to reach a saturation point beyond which no additional ants joined. These results suggest that having more workers in the transport group than necessary may lead to wasted effort (McCreery and Breed, 2014).
Cooperative transport is an intriguing behaviour as it requires coordination of movements and efforts among multiple individuals. Further research should investigate the mechanisms underlying the stability of transport groups, focusing on the rules that determine when ants join or leave and how they overcome navigation failures. Cooperative transport has multiple applications such as in the field of robotics. A recent trend in Artificial Intelligence and Operations Research takes inspiration from social insects, using them as a model for developing problem-solving techniques and optimization algorithms. This same idea fuels swarm-based or collective robotics. Researchers design distributed control systems that let groups of robots work together efficiently, taking as an example the cooperative transport done by ants (paper de robotics) so robots can reach a form of decentralized decision-making.
References:
Czaczkes T, Ratnieks F. 2013. Cooperative Transport in Ants (Hymenoptera: Formicidae) and elsewhere. Myrmecological News 18:1–11.
Kube, C. R., & Bonabeau, E. 2000. Cooperative transport by ants and robots. Robotics and Autonomous Systems, 30: 85–101. doi:10.1016/S0921-8890(99)00066-4
McCreery HF, Breed MD. 2014. Cooperative transport in ants: a review of proximate mechanisms. Insect Soc 61:99–110. doi:10.1007/s00040-013-0333-3
Franks NR, Sendova-Franks AB, Anderson C. 2001. Division of labour within teams of New World and Old World army ants. Animal Behaviour 62:635–642. doi:10.1006/anbe.2001.1794